كيف يُحسّن العجل المطاطي من التعامل مع الحمولة في الآلات الثقيلة؟
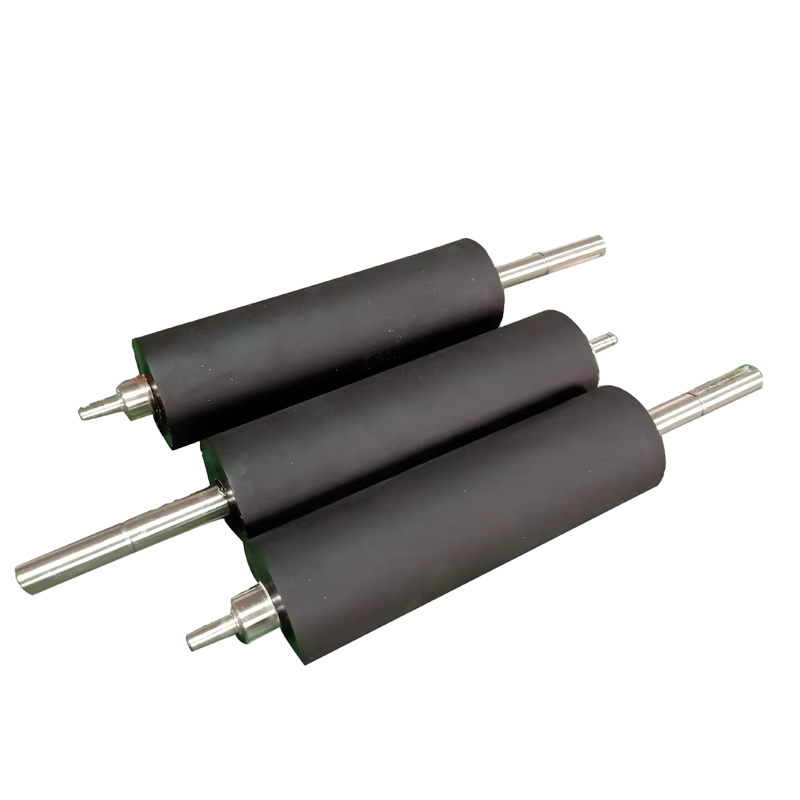
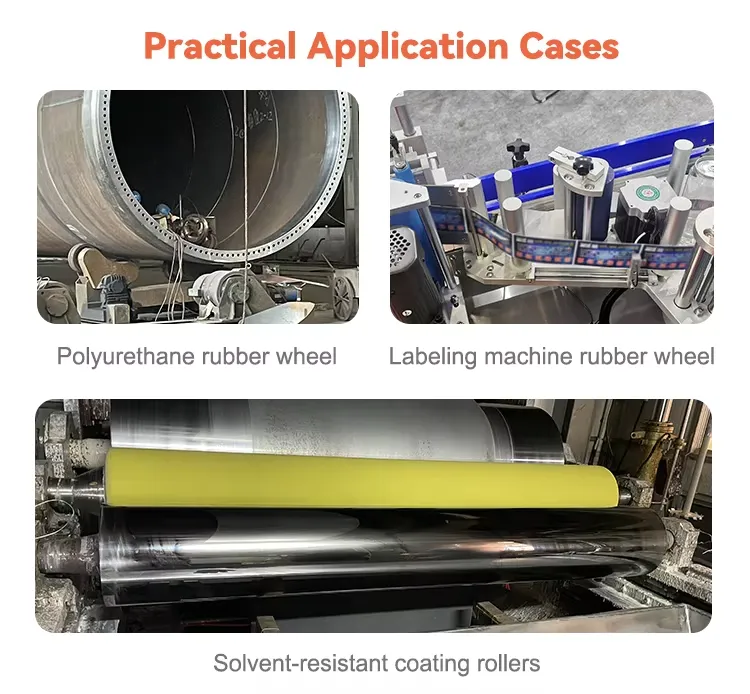
فهم تأثير العجلات المطاطية في المعدات الصناعية: في العالم المليء بالتحديات في العمليات الصناعية، يمكن أن يُحدث اختيار العجلات فرقًا كبيرًا في أداء المعدات والسلامة. لا يعمل العجل المطاطي كعنصر دعم فقط، بل يُعد نقطة تأثير رئيسية...
عرض المزيد